Nová řada servopohonů řízených po ethernetu
 23.5.2013 Minas A5N, servopohony s řízením na
bázi ethernetu, mají nejen velmi kompaktní rozměry, ale jsou také
ideální pro vysoce dynamické aplikace. Díky vysoké přenosové rychlosti
a vzorkovací frekvenci je Minas A5N RTEX (Realtime Express) obzvláště
vhodný pro rychlé řízení dynamických jednoosých i víceosých aplikací -
pick-and-place, etiketovací stroje, stáčírny atd. 23.5.2013 Minas A5N, servopohony s řízením na
bázi ethernetu, mají nejen velmi kompaktní rozměry, ale jsou také
ideální pro vysoce dynamické aplikace. Díky vysoké přenosové rychlosti
a vzorkovací frekvenci je Minas A5N RTEX (Realtime Express) obzvláště
vhodný pro rychlé řízení dynamických jednoosých i víceosých aplikací -
pick-and-place, etiketovací stroje, stáčírny atd.
RTEX poskytuje informace o aktuálním stavu zařízení,
jako jsou například varovné a chybové kódy, aktuální poloha, rychlost,
točivý moment, pozice, odchylka, mechanický a elektrický úhel rotoru,
hodnoty vstupů a výstupů a mnoho dalších. Přístup na všechny jednotky
na síti (100 Mbps full duplex) je možný díky rozšiřujícím jednotkám pro
PLC řady FP Sigma, což umožňuje ovládat až 16 os. Funkce ruční nebo
automatické eliminace vibrací mají jednoduché rozhranní a při uvádění
do provozu je snadné najít optimální nastavení ovladače. Pro propojení
jednotek v síti je do vzdálenosti 100 m možno použít standardní
ethernetové kabely. Navíc systém pohonu obsahuje 20bitový enkodér, což
odpovídá 1 040 000 impulzů na otáčku. Jednotky disponují výkonem od 50
W do 15 kW při otáčkách 0 až 6000 rpm.
Servopohony řady Minas A5N jsou vybaveny bezpečnostní
funkcí odpojení motoru od napájení (STO). To je v souladu s požadavky
na bezpečnostní úroveň D dle ČSN EN ISO 13849 nebo SIL 2 podle EN 62061.
Všechny typy servopohonů řady Minas A5N jsou pro
zajištění optimálního chodu na bázi nezávislých zdvojených obvodů.
Magnetické jističe předepsané pro tato zařízení podle ČSN proto již
nejsou třeba.
Integrovaný bezpečnostní systém umožňuje po bezpečnostní
události uvést stroj do provozu velmi snadno a rychle, protože řídící
jednotka pohonu zůstává stále aktivní a nedochází u ní k restartu. Panasonic
Electric Works Czech, redakčně upraveno
Foto:
Panasonic
 Přečtěte
si také další související články z rubriky Průmyslová automatizace: Přečtěte
si také další související články z rubriky Průmyslová automatizace:
 28.2.2014 O záchranném robotu MEISTeR (Maintenance Equipment
Integrated System of Telecontrol Robot) od Mitsubishi Heavy Industries
jsme již před více než rokem psali v článku Malí roboti do nebezpečných
podmínek. Tento robot byl vyvinut pro náročné odklízecí práce v
havarované jaderné elektrárně Fukushima Daiichi. V druhé polovině února
2014 úspěšně skončily jeho demonstrační testy a nyní již čeká na
nasazení v “ostrém provozu“ při dekontaminaci a odběru vzorků. 28.2.2014 O záchranném robotu MEISTeR (Maintenance Equipment
Integrated System of Telecontrol Robot) od Mitsubishi Heavy Industries
jsme již před více než rokem psali v článku Malí roboti do nebezpečných
podmínek. Tento robot byl vyvinut pro náročné odklízecí práce v
havarované jaderné elektrárně Fukushima Daiichi. V druhé polovině února
2014 úspěšně skončily jeho demonstrační testy a nyní již čeká na
nasazení v “ostrém provozu“ při dekontaminaci a odběru vzorků. 
 13.2.2014 V lednu 2014 představila společnost ABB české odborné
veřejnosti novou řadu svých průmyslových robotů pod označením IRB 6700,
která je již sedmou generací robotů tohoto výrobce. Zároveň jde o
nejvýkonnější roboty při nejnižších celoživotních nákladech v třídě
150–300 kg. 13.2.2014 V lednu 2014 představila společnost ABB české odborné
veřejnosti novou řadu svých průmyslových robotů pod označením IRB 6700,
která je již sedmou generací robotů tohoto výrobce. Zároveň jde o
nejvýkonnější roboty při nejnižších celoživotních nákladech v třídě
150–300 kg.
 3.12.2013 Od konce listopadu 2013 odstraňuje kontaminaci v jaderné
elektrárně Fukushima Daiichi 2 robotický vysavač a mycí stroj
přezdívaný „Raccoon“ (mýval), patřící provozovateli elektrárny,
společnosti Tokyo Electric Power Company (Tepco). V rámci zkušebního
provozu se tento robot pohybuje po podlaze prvního podlaží reaktorové
budovy, drhne a umývá tlakovou vodou její povrch, a snižuje tak
radiaci. 3.12.2013 Od konce listopadu 2013 odstraňuje kontaminaci v jaderné
elektrárně Fukushima Daiichi 2 robotický vysavač a mycí stroj
přezdívaný „Raccoon“ (mýval), patřící provozovateli elektrárny,
společnosti Tokyo Electric Power Company (Tepco). V rámci zkušebního
provozu se tento robot pohybuje po podlaze prvního podlaží reaktorové
budovy, drhne a umývá tlakovou vodou její povrch, a snižuje tak
radiaci.
 30.9.2013 Systémy nosných ramen umožňují snadné a přesné otáčení, jakož i zvedání
a vychýlení ovládacího panelu. Tím je obsluha stroje kdykoliv „v
naprostém obraze“ a má kontrolu nad strojem nebo zařízením. To, že i v
systémech nosných ramen je ještě hodně inovačního potenciálu, ukazuje
společnost Rittal dalším zdokonalením svých řešení v podobě nové
systémové stavebnice. 30.9.2013 Systémy nosných ramen umožňují snadné a přesné otáčení, jakož i zvedání
a vychýlení ovládacího panelu. Tím je obsluha stroje kdykoliv „v
naprostém obraze“ a má kontrolu nad strojem nebo zařízením. To, že i v
systémech nosných ramen je ještě hodně inovačního potenciálu, ukazuje
společnost Rittal dalším zdokonalením svých řešení v podobě nové
systémové stavebnice.
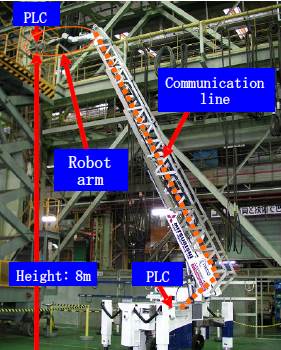 1.7.2013 Jedním z problémů současných průmyslových robotů jsou
silné kabely pro přenos energie a informací mezi tělem robota a
pracovními prvky na konci robotických paží – nástroji, kamerami, čidly
apod. Tyto silné kabely značně omezují manévrovací schopnost robota a
mohou být i jeho zranitelnou součástí. Japonští výrobci Mitsubishi
Heavy Industries, Ltd. (MHI) a NCXX Inc. proto nyní přicházejí s
technickým řešením, které poprvé v průmyslové praxi umožní značně
zredukovat kabeláž robota pomocí technologie komunikace po silovém
vedení 1.7.2013 Jedním z problémů současných průmyslových robotů jsou
silné kabely pro přenos energie a informací mezi tělem robota a
pracovními prvky na konci robotických paží – nástroji, kamerami, čidly
apod. Tyto silné kabely značně omezují manévrovací schopnost robota a
mohou být i jeho zranitelnou součástí. Japonští výrobci Mitsubishi
Heavy Industries, Ltd. (MHI) a NCXX Inc. proto nyní přicházejí s
technickým řešením, které poprvé v průmyslové praxi umožní značně
zredukovat kabeláž robota pomocí technologie komunikace po silovém
vedení
 16.4.2013
Projektový tým vedený britskou společností OC
Robotics zahájil na konci března 2013 výzkumný a vývojový projekt
LaserSnake2. Jeho cílem je vyvinout robot s dlouhými hadovitými
končetinami pro práci ve stísněných prostorách, ve vzduchu a pod vodou. 16.4.2013
Projektový tým vedený britskou společností OC
Robotics zahájil na konci března 2013 výzkumný a vývojový projekt
LaserSnake2. Jeho cílem je vyvinout robot s dlouhými hadovitými
končetinami pro práci ve stísněných prostorách, ve vzduchu a pod vodou.
 25.2.2013 Diodové vysoce výkonné laserové systémy pro opracovávání
materiálů, jako řezání nebo sváření, hrají v průmyslu stále důležitější
roli. Jejich výhodou oproti jiným typům průmyslových laserů jsou nižší
provozní náklady, vyšší výkonnost a menší velikost. Tento typ laserů je
také stále důležitější při opracovávání optických materiálů. S
rozšiřováním jejich použití roste celkový důraz na jejich nákladovou
efektivnost. Vývoj v této oblasti se zaměřuje na zvyšování výkonů a
zároveň snižování nákladů laserových systémů. 25.2.2013 Diodové vysoce výkonné laserové systémy pro opracovávání
materiálů, jako řezání nebo sváření, hrají v průmyslu stále důležitější
roli. Jejich výhodou oproti jiným typům průmyslových laserů jsou nižší
provozní náklady, vyšší výkonnost a menší velikost. Tento typ laserů je
také stále důležitější při opracovávání optických materiálů. S
rozšiřováním jejich použití roste celkový důraz na jejich nákladovou
efektivnost. Vývoj v této oblasti se zaměřuje na zvyšování výkonů a
zároveň snižování nákladů laserových systémů.
 23.2.2013 Odstraňování následků nehody v jaderné elektrárně
Fukushima je neustálou výzvou pro technologie průmyslových robotů,
které umí samostatně vykonávat manuální práce v nepřístupných místech
nebo v kontaminovaném prostředí. Po úspěšném robotu MEISTeR přichází Mitsubishi Heavy Industries (MHI) s dalším unikátním robotem
označeným jako MHI-Super Giraffe (MARS-C), tedy „superžirafa“. Název
tohoto robota je jednak akronym, a jednak výstižné pojmenování jeho schopnosti dosáhnout až do výšky 8 metrů. 23.2.2013 Odstraňování následků nehody v jaderné elektrárně
Fukushima je neustálou výzvou pro technologie průmyslových robotů,
které umí samostatně vykonávat manuální práce v nepřístupných místech
nebo v kontaminovaném prostředí. Po úspěšném robotu MEISTeR přichází Mitsubishi Heavy Industries (MHI) s dalším unikátním robotem
označeným jako MHI-Super Giraffe (MARS-C), tedy „superžirafa“. Název
tohoto robota je jednak akronym, a jednak výstižné pojmenování jeho schopnosti dosáhnout až do výšky 8 metrů.
 24.12.2012
V posledních týdnech roku 2012 se světu představili malí roboti pro
záchranné práce v nepřístupném prostředí – robot MEISTeR od firmy
Mitsubishi Heavy Industries a robot Tetrapod od firmy Toshiba. Ačkoliv
jejich celková koncepce je na první pohled odlišná, oba sloučí
podobnému účelu a mají podobnou pohonnou jednotku i některé další
vlastnosti. 24.12.2012
V posledních týdnech roku 2012 se světu představili malí roboti pro
záchranné práce v nepřístupném prostředí – robot MEISTeR od firmy
Mitsubishi Heavy Industries a robot Tetrapod od firmy Toshiba. Ačkoliv
jejich celková koncepce je na první pohled odlišná, oba sloučí
podobnému účelu a mají podobnou pohonnou jednotku i některé další
vlastnosti.

|