Robot zkoumá vnitřek poškozeného kontainmentu v
elektrárně Fukushima
 15.4.2015
Pro průzkum areálu havarované japonské jaderné
elektrárny Fukushima Daiichi, patřící společnosti Tokyo Electric Power
Company (Tepco), jsou ve velké míře využívány specializované průmyslové
roboty, o nichž jsme se na našem portále zmiňovali například v
souvislosti s robotem MEISTeR. V
první polovině dubna 2015 začal jiný takovýto robot zkoumat vnitřek
kontainmentové nádoby v bloku 1 této elektrárny (viz obě fota). 15.4.2015
Pro průzkum areálu havarované japonské jaderné
elektrárny Fukushima Daiichi, patřící společnosti Tokyo Electric Power
Company (Tepco), jsou ve velké míře využívány specializované průmyslové
roboty, o nichž jsme se na našem portále zmiňovali například v
souvislosti s robotem MEISTeR. V
první polovině dubna 2015 začal jiný takovýto robot zkoumat vnitřek
kontainmentové nádoby v bloku 1 této elektrárny (viz obě fota).
Tento robot, připomínající spíše vesmírnou bytost než
klasického průmyslového robota, sestává ze tří segmentů: těla a dvou
kompaktních nohou. Jeho zvláštností je, že dokáže měnit svůj tvar.
Úzkými prostory, například potrubími, prochází v dlouhém rovném tvaru.
Pro pohyb po ploše dokáže otočit své nohy o 90 stupňů vůči centrálnímu
tělu a vytvořit tak tvar písmene U, kdy mu nohy poskytnou lepší
stabilitu.
Robot je 9 cm vysoký a váží 7,5 kg. Podle polohy jeho
nohou dosahuje 25 až 64 cm do délky a 6,5 až 27 cm do šířky. Ovládán je
40m dlouhým kabelem.
Robot byl vyvinut ve spolupráci výzkumného ústavu IRID
(International Research Institute for Nuclear Decommissioning) a
společnosti Hitachi-GE Nuclear Energy jako nástroj pro průzkum těžko
přístupných oblastí této jaderné elektrárny.
 Při své první „misi“ následující po několika zkušebních
akcích, prošel robot potrubím o průměru 10 cm a dosáhl, jako dosud
první robot, vnitřku kontainmentové nádoby. Poté byl po kabelu spuštěn
na rošt prvního podlaží nádoby. Zde zaujal tvar písmene U a zkoumal
úroveň teploty a radiace a fotografoval vnitřek nádoby. Po splnění 14 z
18 úkolů robot uváznul v troskách vnitřního vybavení, přitom ještě
stačil pořídit důležité záběry. Nyní je zkoumán další možný postup. Při své první „misi“ následující po několika zkušebních
akcích, prošel robot potrubím o průměru 10 cm a dosáhl, jako dosud
první robot, vnitřku kontainmentové nádoby. Poté byl po kabelu spuštěn
na rošt prvního podlaží nádoby. Zde zaujal tvar písmene U a zkoumal
úroveň teploty a radiace a fotografoval vnitřek nádoby. Po splnění 14 z
18 úkolů robot uváznul v troskách vnitřního vybavení, přitom ještě
stačil pořídit důležité záběry. Nyní je zkoumán další možný postup.
Předpokládá se, že robot tohoto typu bude vnitřek nádoby
dále zkoumat a dosáhne nižších částí nádoby, kde se předpokládá, že se
usadilo roztavené jaderné palivo. Protože je však tato část zatopena
vodou, musí být k tomuto účelu použita jeho vodě odolná verze, která
bude vyvinuta do března 2016.
redakce
Proelektrotechniky.cz
Foto ©
IRID
Další informace zde a také zde
 Přečtěte si také: Přečtěte si také:
 19.12.2014 Podzemní potrubí jsou důležitou součástí jaderných
elektráren, jejich pravidelná kontrola je však velmi obtížná. Zpravidla
se při ní využívají nepřímé metody, například vyhledávání zkorodovaných
částí pomocí bludných proudů nebo vyhledávání prasklin pomocí
ultrazvuku, protože přímá vizuální kontrola by znamenala náročné
výkopové práce. Společnost GE Hitachi proto vyvinula ultrazvukového
článkového robota s vlastním pohonem, schopného provádět přímou
kontrolu těchto potrubí. 19.12.2014 Podzemní potrubí jsou důležitou součástí jaderných
elektráren, jejich pravidelná kontrola je však velmi obtížná. Zpravidla
se při ní využívají nepřímé metody, například vyhledávání zkorodovaných
částí pomocí bludných proudů nebo vyhledávání prasklin pomocí
ultrazvuku, protože přímá vizuální kontrola by znamenala náročné
výkopové práce. Společnost GE Hitachi proto vyvinula ultrazvukového
článkového robota s vlastním pohonem, schopného provádět přímou
kontrolu těchto potrubí. 
 31.10.2014
Od konce října 2014 zdobí náměstíčko u nového
obchodního centra Quadrio v centru Prahy pohyblivá socha Franze Kafky z
dílny Davida Černého (viz foto vpravo). Toto technicko-umělecké dílo je
unikátní tím, že 42 otáčejících se pater vytvoří v jeden okamžik tvář
Franze Kafky. Jedenáctimetrovou sochu o hmotnosti 39 tun
vyprojektovala, zkonstruovala a instalovala společnost DEIMOS, výrobce
automatizační techniky. Řídicí a pohonný systém dodala společnost
Siemens. 31.10.2014
Od konce října 2014 zdobí náměstíčko u nového
obchodního centra Quadrio v centru Prahy pohyblivá socha Franze Kafky z
dílny Davida Černého (viz foto vpravo). Toto technicko-umělecké dílo je
unikátní tím, že 42 otáčejících se pater vytvoří v jeden okamžik tvář
Franze Kafky. Jedenáctimetrovou sochu o hmotnosti 39 tun
vyprojektovala, zkonstruovala a instalovala společnost DEIMOS, výrobce
automatizační techniky. Řídicí a pohonný systém dodala společnost
Siemens.
 15.9.2014
Na začátku září 2014 informovala společnost ABB
odbornou veřejnost o představení svého robota označeného jako YuMi®
(you and me – ty a já), schopného v plném rozsahu spolupracovat s
člověkem. YuMi je dvouramenný robot, konstruovaný pro
automatizované procesy při přesné výrobě – například pro montáž
drobných součástek při výrobě spotřební elektroniky, kde robot a člověk
musí úzce spolupracovat. 15.9.2014
Na začátku září 2014 informovala společnost ABB
odbornou veřejnost o představení svého robota označeného jako YuMi®
(you and me – ty a já), schopného v plném rozsahu spolupracovat s
člověkem. YuMi je dvouramenný robot, konstruovaný pro
automatizované procesy při přesné výrobě – například pro montáž
drobných součástek při výrobě spotřební elektroniky, kde robot a člověk
musí úzce spolupracovat.
 28.2.2014 O záchranném robotu MEISTeR (Maintenance Equipment
Integrated System of Telecontrol Robot) od Mitsubishi Heavy Industries
jsme již před více než rokem psali v článku Malí roboti do nebezpečných
podmínek. Tento robot byl vyvinut pro náročné odklízecí práce v
havarované jaderné elektrárně Fukushima Daiichi. V druhé polovině února
2014 úspěšně skončily jeho demonstrační testy a nyní již čeká na
nasazení v “ostrém provozu“ při dekontaminaci a odběru vzorků. 28.2.2014 O záchranném robotu MEISTeR (Maintenance Equipment
Integrated System of Telecontrol Robot) od Mitsubishi Heavy Industries
jsme již před více než rokem psali v článku Malí roboti do nebezpečných
podmínek. Tento robot byl vyvinut pro náročné odklízecí práce v
havarované jaderné elektrárně Fukushima Daiichi. V druhé polovině února
2014 úspěšně skončily jeho demonstrační testy a nyní již čeká na
nasazení v “ostrém provozu“ při dekontaminaci a odběru vzorků.
 3.12.2013 Od konce listopadu 2013 odstraňuje kontaminaci v jaderné
elektrárně Fukushima Daiichi 2 robotický vysavač a mycí stroj
přezdívaný „Raccoon“ (mýval), patřící provozovateli elektrárny,
společnosti Tokyo Electric Power Company (Tepco). V rámci zkušebního
provozu se tento robot pohybuje po podlaze prvního podlaží reaktorové
budovy, drhne a umývá tlakovou vodou její povrch, a snižuje tak
radiaci. 3.12.2013 Od konce listopadu 2013 odstraňuje kontaminaci v jaderné
elektrárně Fukushima Daiichi 2 robotický vysavač a mycí stroj
přezdívaný „Raccoon“ (mýval), patřící provozovateli elektrárny,
společnosti Tokyo Electric Power Company (Tepco). V rámci zkušebního
provozu se tento robot pohybuje po podlaze prvního podlaží reaktorové
budovy, drhne a umývá tlakovou vodou její povrch, a snižuje tak
radiaci.
 1.7.2013 Jedním z problémů současných průmyslových robotů jsou
silné kabely pro přenos energie a informací mezi tělem robota a
pracovními prvky na konci robotických paží – nástroji, kamerami, čidly
apod. Tyto silné kabely značně omezují manévrovací schopnost robota a
mohou být i jeho zranitelnou součástí. Japonští výrobci Mitsubishi
Heavy Industries, Ltd. (MHI) a NCXX Inc. proto nyní přicházejí s
technickým řešením, které poprvé v průmyslové praxi umožní značně
zredukovat kabeláž robota pomocí technologie komunikace po silovém
vedení 1.7.2013 Jedním z problémů současných průmyslových robotů jsou
silné kabely pro přenos energie a informací mezi tělem robota a
pracovními prvky na konci robotických paží – nástroji, kamerami, čidly
apod. Tyto silné kabely značně omezují manévrovací schopnost robota a
mohou být i jeho zranitelnou součástí. Japonští výrobci Mitsubishi
Heavy Industries, Ltd. (MHI) a NCXX Inc. proto nyní přicházejí s
technickým řešením, které poprvé v průmyslové praxi umožní značně
zredukovat kabeláž robota pomocí technologie komunikace po silovém
vedení
 16.4.2013
Projektový tým vedený britskou společností OC
Robotics zahájil na konci března 2013 výzkumný a vývojový projekt
LaserSnake2. Jeho cílem je vyvinout robot s dlouhými hadovitými
končetinami pro práci ve stísněných prostorách, ve vzduchu a pod vodou. 16.4.2013
Projektový tým vedený britskou společností OC
Robotics zahájil na konci března 2013 výzkumný a vývojový projekt
LaserSnake2. Jeho cílem je vyvinout robot s dlouhými hadovitými
končetinami pro práci ve stísněných prostorách, ve vzduchu a pod vodou.
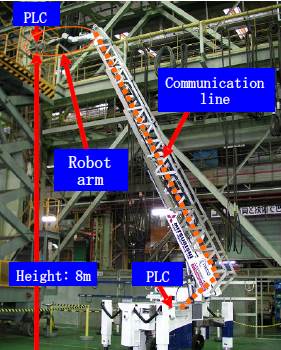
 23.2.2013 Odstraňování následků nehody v jaderné elektrárně
Fukushima je neustálou výzvou pro technologie průmyslových robotů,
které umí samostatně vykonávat manuální práce v nepřístupných místech
nebo v kontaminovaném prostředí. Po úspěšném robotu MEISTeR přichází Mitsubishi Heavy Industries (MHI) s dalším unikátním robotem
označeným jako MHI-Super Giraffe (MARS-C), tedy „superžirafa“. Název
tohoto robota je jednak akronym, a jednak výstižné pojmenování jeho schopnosti dosáhnout až do výšky 8 metrů. 23.2.2013 Odstraňování následků nehody v jaderné elektrárně
Fukushima je neustálou výzvou pro technologie průmyslových robotů,
které umí samostatně vykonávat manuální práce v nepřístupných místech
nebo v kontaminovaném prostředí. Po úspěšném robotu MEISTeR přichází Mitsubishi Heavy Industries (MHI) s dalším unikátním robotem
označeným jako MHI-Super Giraffe (MARS-C), tedy „superžirafa“. Název
tohoto robota je jednak akronym, a jednak výstižné pojmenování jeho schopnosti dosáhnout až do výšky 8 metrů.
 24.12.2012
V posledních týdnech roku 2012 se světu představili malí roboti pro
záchranné práce v nepřístupném prostředí – robot MEISTeR od firmy
Mitsubishi Heavy Industries a robot Tetrapod od firmy Toshiba. Ačkoliv
jejich celková koncepce je na první pohled odlišná, oba sloučí
podobnému účelu a mají podobnou pohonnou jednotku i některé další
vlastnosti. 24.12.2012
V posledních týdnech roku 2012 se světu představili malí roboti pro
záchranné práce v nepřístupném prostředí – robot MEISTeR od firmy
Mitsubishi Heavy Industries a robot Tetrapod od firmy Toshiba. Ačkoliv
jejich celková koncepce je na první pohled odlišná, oba sloučí
podobnému účelu a mají podobnou pohonnou jednotku i některé další
vlastnosti.

|